
Introduzione
Nel contesto delle competizioni ciclistiche su veicoli reclinati, la posizione del ciclista gioca un ruolo determinante sia in termini di aerodinamica sia di efficienza biomeccanica. Tuttavia, la validazione oggettiva della postura assunta in gara non è banale, soprattutto quando si esce dai canoni tradizionali del ciclismo da strada. L’esigenza di comprendere se la produzione di potenza muscolare fosse realmente ottimale ci ha spinto ad avvalerci di uno degli strumenti più potenti nel campo della biomeccanica computazionale: OpenSim.
Obiettivo del progetto
Lo scopo principale di questo lavoro è stato sviluppare un modello muscoloscheletrico in OpenSim capace di rappresentare accuratamente un ciclista in posizione reclinata, con l’obiettivo a lungo termine di analizzare e ottimizzare la postura in funzione dell’efficienza biomeccanica. In particolare, ci siamo focalizzati sull’elaborazione di un modello personalizzato, adattato al nostro atleta e alla configurazione specifica del veicolo, in grado di restituire simulazioni attendibili del gesto atletico.
Sviluppo del modello
l modello è stato creato ex novo, sfruttando software ausiliari per generare una mesh scheletrica e muscolare su scala, basata sulle caratteristiche antropometriche del nostro ciclista. Un ulteriore passo fondamentale è stata la generazione di file di movimento compatibili con OpenSim, ottenuti da riprese marker-less e successiva elaborazione.
La particolarità del modello risiede nella sua configurazione supina, tipica del ciclismo reclinato. Questo ha richiesto una rielaborazione completa della postura standard, ponendo sfide non banali nella definizione delle coordinate articolari e dei vincoli cinematici. In particolare, è stato necessario ripensare l’interazione tra bacino, colonna vertebrale e femore, per garantire realismo sia statico che dinamico al modello.

Prime analisi ed esperimenti
Utilizzando il modello sviluppato, sono state condotte con successo analisi di Inverse Kinematics (IK) e Inverse Dynamics (ID). Queste ci hanno permesso di ottenere informazioni preliminari sulla coerenza dei movimenti registrati rispetto al modello muscoloscheletrico, oltre a una prima validazione qualitativa del setup.
Sebbene non sia ancora stato impiegato per l’analisi dettagliata della produzione di potenza muscolare – a causa della necessità di ulteriori miglioramenti e ottimizzazioni – il modello rappresenta già oggi una base robusta per future implementazioni in ambito di analisi neuromuscolare e ottimizzazione posturale.
Strumenti e flusso di lavoro
Per costruire un modello biomeccanico fedele e adatto all’analisi del ciclismo reclinato, è stato necessario integrare più strumenti in un flusso operativo coerente e modulare. La pipeline di sviluppo ha incluso:
- Acquisizione e ricostruzione del movimento: il primo passo ha riguardato la generazione dei dati di movimento a partire da una sequenza video multivista. Utilizzando una piattaforma basata su intelligenza artificiale e modelli biomeccanici predittivi, è stato possibile estrarre automaticamente le traiettorie articolari principali, successivamente adattate a un formato compatibile con gli strumenti di simulazione
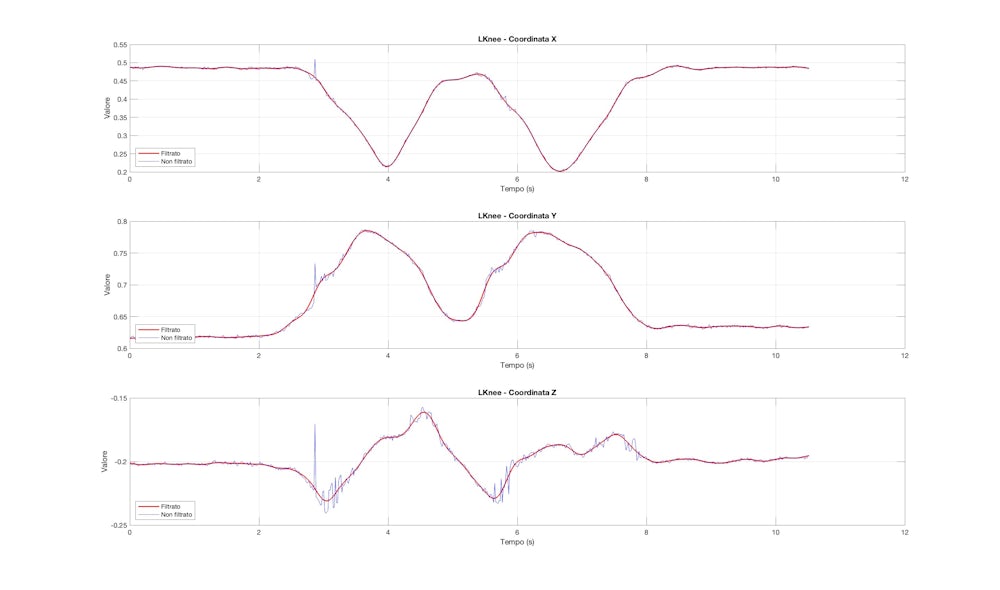
- Elaborazione numerica e personalizzazione: la fase successiva ha coinvolto strumenti computazionali avanzati per la manipolazione di dati biomeccanici, la generazione di segnali cinematici filtrati, e la creazione di script automatizzati per la scalatura e l’adattamento del modello
- Modellazione e interfaccia: per facilitare la costruzione e la modifica della geometria muscoloscheletrica, è stata utilizzata un'interfaccia grafica specializzata, capace di interagire direttamente con la struttura interna del modello
- Controllo e simulazione neuromuscolare: infine, l'ottimizzazione della postura e il controllo motorio sono stati affrontati con un ambiente di simulazione evoluta, in grado di integrare modelli muscolari avanzati e di risolvere problemi di ottimizzazione dinamica
Criticità tecniche e sfide affrontate
Lo sviluppo di un modello biomeccanico per un ciclista in posizione reclinata ha comportato numerose sfide, sia concettuali che pratiche. Le difficoltà principali si sono concentrate in due fasi cruciali: l'acquisizione del movimento e l'elaborazione dei dati per l'integrazione nel modello.
-
Acquisizione del movimento in postura non convenzionale:
La prima criticità è emersa durante l'acquisizione del movimento tramite un sistema basato su visione artificiale e apprendimento automatico. Tale sistema ha mostrato limiti significativi nell’interpretare correttamente posture orizzontali. Si sono verificati errori nella calibrazione spaziale delle telecamere e nel tracciamento delle articolazioni. -
Elaborazione e conversione dei dati per la simulazione:
Una seconda area critica ha riguardato la conversione da formati tabellari a strutture compatibili con l’ambiente di simulazione. La complessità è stata sia tecnica che metodologica: è stato necessario sviluppare una pipeline personalizzata per garantire coerenza tra i dati acquisiti e la struttura articolare del modello muscoloscheletrico.
Conclusione e prospettive future
Il lavoro svolto ha permesso di sviluppare un modello muscoloscheletrico reclinato funzionale e adattabile. Nonostante le difficoltà iniziali, il risultato è una piattaforma simulativa solida, già in grado di restituire risultati affidabili nelle fasi di cinematica inversa e dinamica.
L’implementazione di questo modello rappresenta un passo importante verso la personalizzazione biomeccanica del veicolo. Si apre ora la possibilità concreta di estendere il framework alla configurazione reclinata specifica della nostra hand-bike, ancora più complessa per via del coinvolgimento diretto degli arti superiori. Questo permetterà di analizzare e progettare attivamente la postura del ciclista con disabilità, contribuendo allo sviluppo di soluzioni più efficienti e personalizzate.
