
Introduction
In the context of recumbent vehicle racing, the cyclist's posture plays a crucial role in both aerodynamics and biomechanical efficiency. However, objectively validating the position assumed during competition is not straightforward, especially when departing from traditional upright road cycling norms. The need to understand whether muscle power production was truly optimal led us to adopt one of the most powerful tools in computational biomechanics: OpenSim.
Project Objective
The primary aim of this work was to develop a musculoskeletal model in OpenSim capable of accurately representing a recumbent cyclist. The long-term goal is to analyze and optimize posture in terms of biomechanical efficiency. Specifically, we focused on creating a personalized model, tailored to our athlete and vehicle configuration, capable of providing reliable simulations of the cycling motion.
Model Development
The model was developed from scratch, using auxiliary software to generate a scaled musculoskeletal mesh based on the cyclist’s anthropometric characteristics. A crucial step was the generation of motion files compatible with OpenSim, obtained from marker-less video capture and subsequent processing.
The model’s distinctive feature is its supine configuration, typical of recumbent cycling. This required a complete redesign of the standard upright posture, presenting challenges in defining joint coordinates and kinematic constraints. In particular, it was necessary to rethink the interaction between pelvis, spine, and femur to ensure both static and dynamic realism.

Initial Analyses and Experiments
Using the developed model, we successfully performed Inverse Kinematics (IK) and Inverse Dynamics (ID) analyses. These provided preliminary insights into the consistency of the recorded movements relative to the musculoskeletal model and served as a qualitative validation of the setup.
Although the model has not yet been used for detailed muscle force analysis—due to the need for further improvements and refinements—it already represents a solid foundation for future neuromuscular simulation and posture optimization studies.
Tools and Workflow
To build an accurate biomechanical model suitable for recumbent cycling analysis, we integrated multiple tools into a coherent and modular workflow. The development pipeline included:
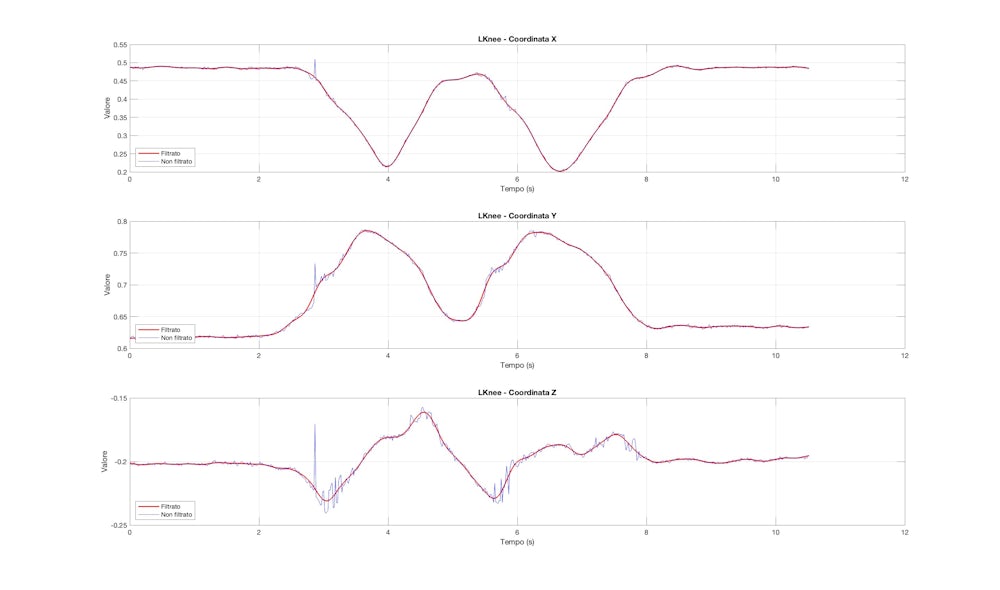
- Motion Acquisition and Reconstruction: the initial step involved capturing movement data from a multi-view video sequence. Using an AI-based platform with predictive biomechanical models, we automatically extracted major joint trajectories and adapted them to a simulation-compatible format
- Numerical Processing and Personalization: advanced computational tools were employed for biomechanical data manipulation, signal filtering, and scripting automation to scale and adapt the model. This phase was critical in customizing the system to our real athlete
- Modeling and Interface Management: a specialized graphical interface was used to build and modify the musculoskeletal geometry, allowing precise control over anatomical parameters, joint coordinates, and constraints
- Neuromuscular Control and Simulation: postural optimization and motor control were tackled in an advanced simulation environment capable of integrating detailed muscle models and solving dynamic optimization problems. This module was especially useful in testing muscle activation strategies and alternative joint constraints
Technical Challenges and Obstacles
Developing a biomechanical model for a recumbent cyclist presented several conceptual and practical challenges, primarily during the movement acquisition and data processing phases.
- Motion Capture in a Non-Standard Posture:
The first major hurdle arose during motion acquisition using a vision-based, machine learning platform. Designed for upright subjects in conventional gravitational contexts, the system struggled with horizontal postures like those in recumbent cycling. Spatial calibration errors and joint tracking issues led to instability in virtual marker reconstruction. The "non-vertical" nature of the motion challenged the underlying predictive model, requiring multiple manual adjustments and empirical testing to achieve a coherent kinematic output - Data Processing and Simulation Integration:
The second major challenge involved translating the kinematic data into a format usable within the simulation environment. Converting tabular data into structured simulation inputs required custom scripting, with careful attention to marker names, reference frames, and measurement units. This phase was not only technically demanding but also methodologically complex, as it required a fully personalized pipeline to ensure consistency between the acquired data and the musculoskeletal model’s structure.
Conclusion and Future Perspectives
This work has led to the development of a functional and adaptable reclined musculoskeletal model, paving the way for biomechanical analysis of non-conventional cycling setups. Despite initial difficulties in acquiring motion data in a horizontal posture and managing data flow between different software environments, the result is a solid simulation platform already capable of reliable outputs in inverse kinematics and dynamics analysis.
Implementing this model represents a significant step toward biomechanical customization of the vehicle, where the cyclist’s posture becomes an optimizable parameter rather than a fixed one. Looking ahead, we are preparing to adapt the current framework to our hand-bike configuration—a vehicle that presents even greater biomechanical complexity due to the involvement of upper limbs in propulsion. Translating the logic and tools validated in this project to hand-cycling will enable not only performance analysis but also the active design of posture and motion for athletes with disabilities, ultimately contributing to the development of more efficient and personalized technical solutions.
